




 分享
分享
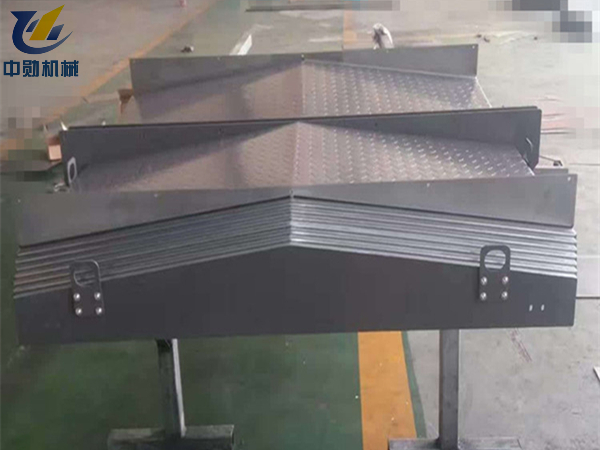


因此,機床的防護罩必須是自動開關,在無人操作的情況下,與上、下料的機械手不能發生干涉,不能影響車輪生產線的工作。因車輪上料、加工、下料需要回轉機械手實現,所以機床防護罩需躲避機械手上下料回轉的工作范圍,為實現這一功能,需機床防護罩能自動上升、下降,防護罩的防護部分在機械手工作時不能有高于機械手高度的部分,在上下料時防護部分避開機械手的工作范圍,且能實現自動化。傳統的機床防護罩需人為的開與關,不能上下運動,機械手在上下料時的手臂與防護罩的防護部分干涉,無法達到加工時的無縫連接
3結語
此工藝方案應用到了實際生產之中,取得了良好的效果,零件加工過程中最后的磨削和銑削工序尤為重要,特別是銑削前要對機床精度進行復檢,包括機床的機械精度、數控重復定位精度、累計誤差等,這都是零件成品精度的重要保證,而且在生產中有很多細節需要注意,例如:焊接后一定要采取退火處理,熱時效后工件的直線度不能超過0.20的調整方式,磨削后的檢驗工件整體直線度的方法,銑削時工件的編程加工順序、安卡方式、進刀量、微調釋放應力等等,因為要徹底消除工件在加工過程中產生的內應力,每個細節的疏忽都會導致工件最終精度的變化。能達到生產線的自動化生產,很難實現現代化生產的要求。
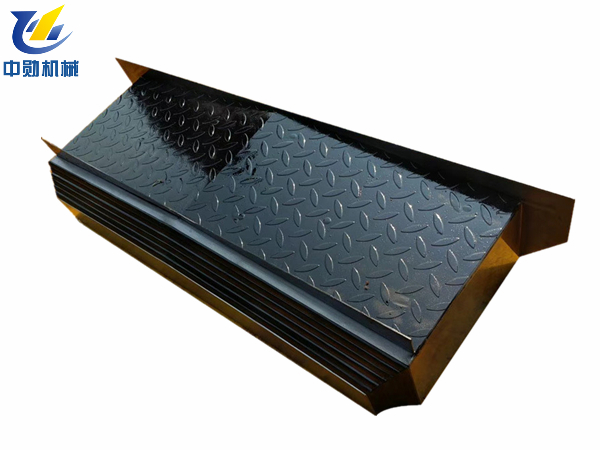
自動升降防護罩
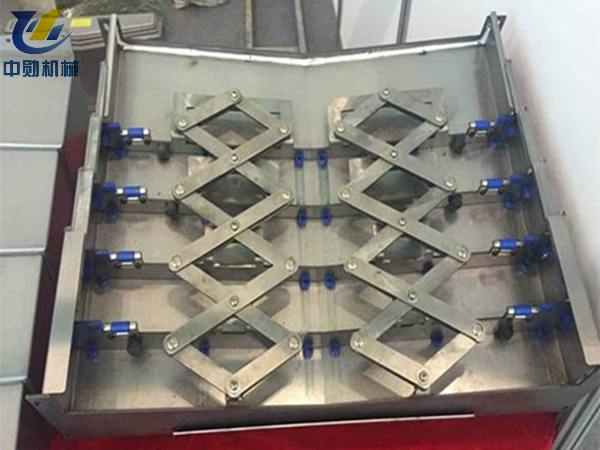
根據車輪加工的上述特點,為實現車輪自動化的加工,與生產線相配合,以下介紹一種能自動升降的機床防護罩。防護罩主要由防護部分、驅動單元、導軌單元、位置檢測部分組成。
防護部分由固定部分運動部分組成,固定部分主要起收集鐵屑、固定主要直線導軌副的作用,保證防護罩的整體剛性,運動部分主要起防護鐵屑飛濺作用,同時需要有足夠剛性,在驅動時不能發生大的變形,影響防護罩升降的平穩性。
2防護罩液壓控制原理
驅動單元的驅動力來源于液壓油缸共2個分別安裝在防護罩的左右對稱部位,安裝在運動的防護部分的重心位置,油缸的一端通過鉸鏈與機床的地基部分連接,另一端通過鉸鏈與防護罩運動部分連接,這樣的連接與構成方式,防止防護部分在升降時驅動力發生力的位移造成力偶現象,使防護部分受到損壞或升降不暢問題。控制的液壓原理液壓控制原理圖。通過分流集流閥和液控單向閥控制驅動油缸的同步,保證力的一致性及壓力的穩定性,保證升降防護罩驅動力的來源安全、可靠、穩定。導軌單元由防護罩前側的個滾動導軌副和后側個導軌副構成。
前側導軌副由與機床地基連接的導軌支架、直線導軌構成,因此部分容易與車輪生產線機械手干涉,直線導軌塊安裝在導軌支架上,其余部分安裝在防護罩上;后側兩處導軌副安裝在左右對稱位置,因此部分不與車輪生產線上下料的機械手干涉,所以直線導軌的導軌塊安裝在防護罩運動部分,其余部分安裝
在防護罩固定部分及固定支架上,固定支架與機床地基連接,提高后側兩部分直線導軌副的整體連接剛性,且可以通過調整墊調整防護罩運動部分的Y軸方向具體位置,調整墊可以調整防護罩運動部分的X軸方向具體位置,解決運動部分在防護罩安裝調試

相關評論 共0條